
En este segundo post dedicado a la Profundidad de Campo en Fotografía Digital, vamos a establecer qué es la PdC y cuáles son los criterios para discernir lo que se considera tolerable en términos de nitidez de imagen.
Operación de enfoque. Según los postulados de la Óptica, cuando el objetivo de una cámara con una determinada longitud focal, está situado a una distancia dada del sensor, la ecuación de las distancias conjugadas establece que la imagen que se forma sobre el plano del sensor procede de un plano del espacio objeto y sólo de uno.
 Ecuación I
Ecuación I
La Ecuación I, ecuación de las distancias conjugadas, relaciona la longitud focal del objetivo (f’), la distancia objeto (u) y la distancia imagen (v). De ella se desprende que para cada distancia imagen (v) y si la longitud focal (f’) del objetivo se mantiene constante, sólo una distancia objeto cumple con la ecuación. Es decir, cuando dejamos el mecanismo de enfoque de la cámara en una determinada posición se genera una distancia del plano principal posterior del objetivo al sensor de registro, una distancia imagen (v). En esta situación, sólo un plano del espacio objeto está perfectamente enfocado sobre el plano del sensor. De forma inversa, cuando enfocamos sobre un objeto que está a una determinada distancia (u) del plano principal anterior del objetivo, el mecanismo manual o de auto-enfoque selecciona la distancia imagen (v) adecuada para que la imagen del objeto esté nítida sobre el plano del sensor.
En la Figura 1 se muestra un esquema idealizado que permite observar como en una situación dada, sólo uno de los objetos situados delante del objetivo se enfoca correctamente sobre el sensor. Los tres puntos objeto, Oa, Ob y Oc, situados a diferentes distancias del objetivo L, ven formadas sus respectivas imágenes Ia, Ib e Ic también a diferentes distancias del objetivo tal como lo establece la Ecuación I. Si el sensor S se sitúa a una distancia tal que sobré él se enfoca la imagen del objeto Oa, las imágenes correspondientes a los objetos Ob y Oc, Ib e Ic respectivamente, se enfocan una por delante y la otra por detrás del plano del sensor y sus proyecciones sobre éste originan imágenes más grandes y borrosas (hacer click sobre la imagen para ver una versión ampliada donde se puede apreciar el detalle de la proyección sobre el sensor).
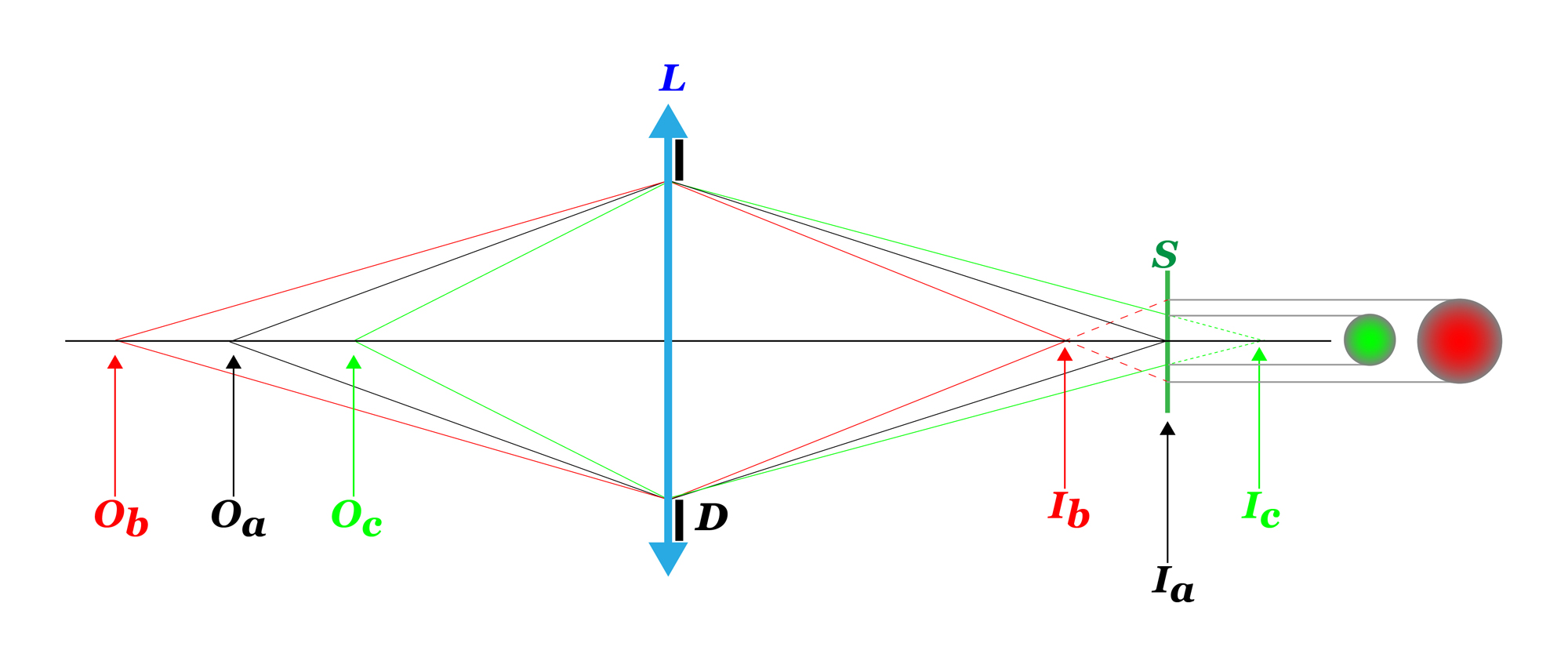
Figura 1. Esquema idealizado de la formación de las imágenes Ia, Ib e Ic a partir de los objetos Oa, Ob y Oc a través de la lente L con diafragma D. Las tres imágenes se proyectan sobre el sensor S. A la derecha se puede observar el tamaño que alcanzan los círculos de confusión de las imágenes Ib e Ic una vez proyectadas sobre el sensor.
Las imágenes de puntos objeto situados sobre el eje óptico formadas por un objetivo se denominan genéricamente círculos de confusión. Los círculos de confusión son la intersección del plano del sensor con los conos de rayos de luz procedentes de imágenes enfocadas por delante o por detrás del plano del sensor. La imagen de un punto enfocado como la Ia de la Figura 1, se denomina círculo de mínima confusión de este objetivo y su diámetro, en ausencia de aberraciones, coincide con el disco de Airy del patrón de difracción. En un objetivo libre de aberraciones, el diámetro del disco de Airy para cada combinación de longitud de onda, abertura de diafragma y aumento es el círculo de confusión más pequeño que ese objetivo es capaz de formar. Cualquier otro círculo de confusión que se proyecte sobre el sensor procedente de una imagen formada por delante o por detrás del mismo, es siempre de mayor tamaño. La Ecuación II permite calcular el diámetro del disco de Airy para una situación dada, donde λ es la longitud de onda de la luz, N el número de diafragma y m el aumento. En óptica real, por lo tanto, la imagen de un punto siempre es una mancha por pequeña que sea.
![]() Ecuación II
Ecuación II
Definición de la Profundidad de Campo. Se define la PdC como el conjunto de planos ortogonales al eje óptico en el espacio objeto cuyas imágenes en el espacio imagen presentan una nitidez aceptable o tolerable. Los términos nitidez aceptable o tolerable asumen, para cada situación, la no existencia real de más de un plano en el espacio objeto cuyas imágenes presenten nitidez. La cuestión es establecer un criterio que delimite lo que se considera aceptable o tolerable en términos de nitidez. Es decir, hasta cuando pueden crecer los círculos de confusión de las imágenes que se enfocan por delante y por detrás del sensor para que su falta de nitidez pase inadvertida para el observador. La profundidad de campo es pues un convenio, no una propiedad de los objetivos.
Si de lo que se trata es de que el mayor tamaño de estos círculos de confusión no pueda ser detectado por el observador de la imagen, la primera estrategia consiste en hacer que para una situación dada, no crezcan tanto. En la Figura 2 se muestra la misma situación de la Figura 1 pero ahora con el diafragma bastante más cerrado (hacer click sobre la imagen para ver una versión ampliada donde se puede apreciar el detalle de la proyección sobre el sensor).
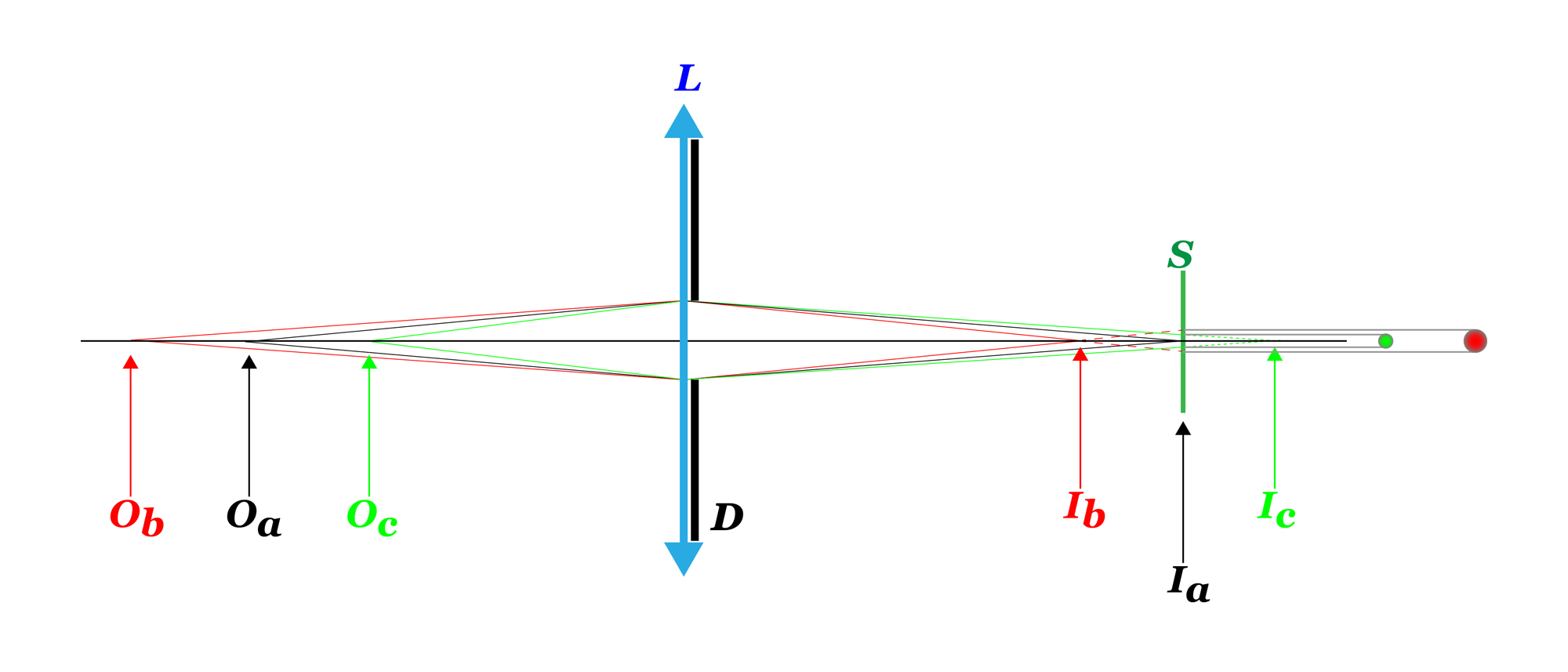
Figura 2. Esquema idealizado de la formación de las imágenes Ia, Ib e Ic a partir de los objetos Oa, Ob y Oc a través de la lente L con diafragma D. Las tres imágenes se proyectan sobre el sensor S. A la derecha se puede observar el tamaño que alcanzan los círculos de confusión de las imágenes Ib e Ic una vez proyectadas sobre el sensor.
En esta nueva situación, con el diafragma más cerrado, la geometría de formación de las imágenes limita el crecimiento de los círculos de confusión a pesar de que los objetos se hallan a la misma distancia del objetivo que en la situación anterior y sus respectivas imágenes se forman en los mismos lugares, la imagen Ia enfocada sobre el plano del sensor y las Ib e Ic por delante y por detrás del mismo respectivamente.
En las Figuras 3 y 4 se muestra el gradiente de crecimiento de los círculos de confusión de imágenes enfocadas por delante y por detrás del sensor comparado con el tamaño del círculo de mínima confusión de la imagen enfocada sobre el plano del sensor. En las figuras y para facilitar la comparación de tamaños, el diámetro de los diferentes círculos de confusión es el que resultaría de su proyección sobre la superficie del sensor, aunque su posición se corresponde con la imagen enfocada de la que proceden, por delante o por detrás del sensor.
La Figura 3 se corresponde con una situación de abertura de diafragma grande; observar la gran diferencia de tamaño relativo entre el círculo de mínima confusión y los círculos de confusión desenfocados. En la Figura 4, además de que el gradiente de crecimiento de los círculos de confusión es menor, observar como a causa de la mayor difracción al disminuir la abertura del diafragma, el tamaño del círculo de mínima confusión es mayor. Ello significa que aunque existe una menor diferencia entre las partes enfocadas y las desenfocadas de la imagen, la zona de mayor nitidez ha disminuido su calidad respecto de la situación con una abertura de diafragma más grande, con una menor tasa de difracción.
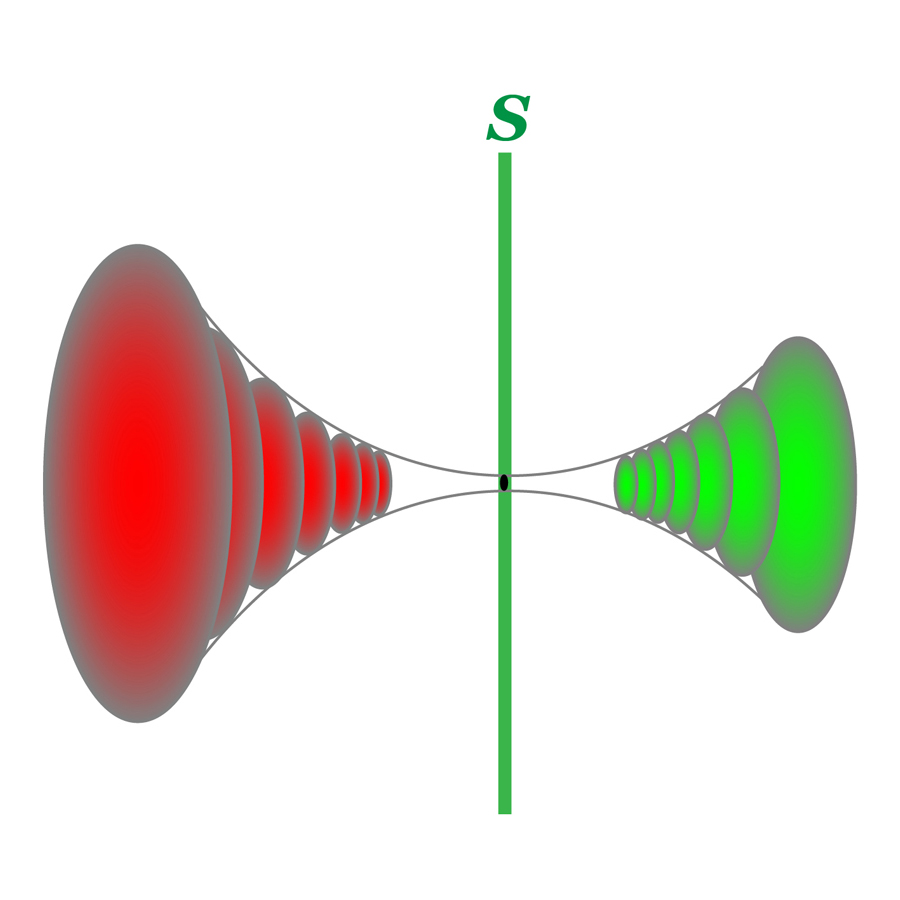
Figura 3. Esquema idealizado del gradiente de crecimiento de los círculos de confusión de las imágenes desenfocadas en relación al tamaño del círculo de mínima confusión enfocado sobre el sensor, en negro, para una situación de abertura de diafragma grande.

Figura 4. Esquema idealizado del gradiente de crecimiento de los círculos de confusión de las imágenes desenfocadas en relación al tamaño del círculo de mínima confusión enfocado sobre el sensor, en negro, para una situación de abertura de diafragma pequeña.
Por otra parte, la práctica demuestra que en las imágenes de escenas tridimensionales tomadas con una cámara fotográfica y sea cual sea el diámetro de la abertura del diafragma, siempre hay una porción mayor o menor de imagen con una nitidez aceptable. Según lo visto anteriormente, ello implica que esa porción más o menos extensa de la imagen está formada por círculos de confusión de un tamaño que no es percibido como tal por parte del observador. Huelga decir que el conocimiento y control de la extensión de esa región con nitidez aceptable es uno de los mayores recursos descriptivos de la fotografía.
Criterio de tolerancia de nitidez. Una vez establecido el escenario de comportamiento de la nitidez proyectada sobre el sensor a partir de las imágenes que se forman por delante y por detrás de éste, es necesario establecer hasta qué tamaño se puede considerar tolerable en términos de percepción por parte del observador final de la imagen. Este criterio puede basarse en la agudeza visual o capacidad del sistema visual humano (SVH) para detectar o resolver pequeños detalles. El poder de resolución del ojo o agudeza visual es la capacidad para discriminar pequeños detalles en el campo de visión y decrece radialmente dentro de éste.
El poder de resolución del SVH se cifra en alrededor de un minuto de arco (1′) lo que equivale a una anchura de 0,075mm a la distancia de visión confortable, que se establece en 25cm. Este rendimiento máximo difícilmente se alcanza habitualmente y se suele tomar como valor más real el de 0,1mm. Esta anchura, representada como un ciclo espacial, es decir, una línea más un espacio adyacente de igual anchura tal y como se suelen utilizar en los test de resolución de barras, alcanza un valor de 0,2mm. El valor promedio del poder de resolución del SVH a la distancia de visión confortable es pues de 5ciclos/mm o 5lp/mm (pares de lineas por milímetro).
Para una fotografía observada a la distancia de visión confortable de 25cm, cualquier detalle registrado en la imagen con un tamaño menor de 0,2mm no será visible para el ojo desnudo del observador. Así, el círculo de confusión máximo permisible es el que alcanza este diámetro de 0,2mm. Para simplificar se le denomina círculo de tolerancia (Ct). Como se ha comentado anteriormente, esta agudeza visual disminuye a medida que aumenta el campo visual. El campo visual útil del SVH a la distancia de 25cm alcanza un diámetro aproximado de 290mm. Si inscribimos en este círculo un rectángulo con la proporción 3:4, habitual en formatos de fotografía, resulta en unas dimensiones de 18x24cm.
Si las imágenes tomadas con una cámara deben ampliarse hasta este tamaño para ser observadas a la distancia de visión confortable, el tamaño máximo del círculo de tolerancia dependerá en cada caso, de las dimensiones del sensor, ya que el grado de ampliación será distinto en función de estas dimensiones. La Ecuación III se utiliza para calcular el factor de ampliación para unas dimensiones de sensor dadas. Dado que las dimensiones de los sensores no siempre guardan la misma proporción que el formato de 18x24cm, se suele trabajar con la hipótesis de encajar el contenido del lado mayor del sensor en el lado mayor de la copia de 18x24cm, para evitar recortar la imagen captada. Si por el contrario, se prevé recortar la imagen llenando la copia de 18x24cm, el cálculo debe hacerse relacionando los lados menores, tanto del sensor como de la copia. Una tercera opción consiste en promediar los valores obtenidos para las dos dimensiones del sensor. En los formatos de sensor habituales, cualquiera de las tres formas de cálculo da unos resultados similares.
 Ecuación III
Ecuación III
Para calcular el círculo de tolerancia correspondiente a cada sensor, sólo hay que dividir el círculo de tolerancia de la copia de 18x24cm por el factor de ampliación, tal como se expresa en la Ecuación IV.
 Ecuación IV
Ecuación IV
Este estándar se ha venido aplicando desde mediados del Siglo XX para confeccionar las tablas de profundidad de campo y las escalas grabadas en el barrilete de los objetivos como el mostrado en el anterior post Profundidad de Campo en Fotografía Digital (I). Aplicando las Ecuaciones III y IV a una cámara de formato 35mm, el actualmente llamado full frame, con un sensor de 24x36mm, se obtiene un diámetro máximo para el círculo de tolerancia de 0,03mm. Si se consultan los metadatos de una cámara Nikon de sensor electrónico full frame, cuyas dimensiones específicas son 23,9x36mm según el propio fabricante, el valor anotado de Circle of Confussion (se refiere a nuestro círculo de tolerancia) es, efectivamente, de 0,03mm.
Si el análisis de metadatos lo hacemos en una Fujifilm X100, con un sensor de 15,8×23,6mm, el valor asignado en Circle of Confussion es de 0,02mm. Despejando el Factor de Ampliación de la Ecuación IV con este valor de círculo de tolerancia, se deduce que Fuji adopta un valor de x10, que resulta aproximadamente de encajar la imagen completa (23,6mm) en el lado mayor de la copia estándar de 18x24cm.
De los datos de PdC para una situación dada y unque no lo especifican en los resultados, se deduce que las aplicaciones para iPhone DOFMaster y PhotoPills utilizan un valor de círculo de tolerancia de aproximadamente 0,028mm si se les ajustan los datos de la Nikon D700. Este resultado es el que se obtiene de promediar los factores de ampliación de los lados mayor y menor del sensor. La diferencia entre aplicar este círculo de tolerancia o el de 0,03mm, en términos de profundidad de campo, es irrelevante en fotografía general.
Luego, el criterio de tolerancia de nitidez que utilizan actualmente todos estos fabricantes y responsables de desarrollo de software es el mismo que se ha venido empleando desde mediados del SigloXX en fotografía. Es decir, la expectativa de profundidad de campo en las imágenes sigue estando ligada a la observación de una ampliación de 18x24cm a la distancia de visión confortable de 25cm. Más adelante desarrollaremos algunas cuestiones relacionadas con este aspecto.
En el siguiente post calcularemos la extensión de la PdC para una situación dada, estableceremos la posición de los límites anterior y posterior de la misma y haremos algunas diferencias según la distancia de trabajo.
Referencias
- JACOBSON, R.E., RAY, S. F.,ATTRIDGE, G. G. y AXFORD, N. R. (2001). MANUAL DE FOTOGRAFÍA. Ed. Omega S. A., Barcelona.
- MILLÁN GARCÍA‐VARELA, M. S., ESCOFET SOTERAS, J., PÉREZ CABRÉ, E. (2004) ÓPTICA GEOMÉTRICA. Ed. Ariel, Barcelona.
- RAY, Sidney F. (1984) APPLIED PHOTOGRAPHIC OPTICS. Ed. Focal Press, London.

Quan als meus alumnes els hi vaig explicar la PdC i els hi vaig presentar les primeres equacions es van queixar al cap d’estudis (per un parell de divisions) qui em va suggerir que ometès la part “matemàtica” (increible) de les lliçons. Desprès ens portem les mans al cap quan veiem coses com aquesta:
http://www.abc.es/agencias/noticia.asp?noticia=1420389
350.000 Bars (hosteleria) / 47.2 milions d’habitants (espanya) = 132Bars/habitant
LikeLike
Ja, ja, ja! No sé quina és la relació directa entre el nombre de bars i les ganes d’estudiar dels alumnes, però el cap d’estudis “no tiene desperdicio”. Deu ser de la generació dels que “progressaven adequadament” mentre retallaven i enganxaven orenetes i dracs als vidres de la classe. Ajudats per la “senyo”, és clar.
LikeLike
Fixa’t que qui ha fet la rel·lació de persones/Bar ho ha fet a l’inreves. Toquen a 132 habitants per Bar i no 132 Bar / habitant. (Publicat a l’ABC) Que fuerte que fuerte
LikeLike
relacionada:
http://naukas.com/2013/05/29/una-leccion-de-estadistica-loca-con-cocacola/
LikeLike